靴軌平順性測試及靴軌視頻監(jiān)測系統(tǒng)
發(fā)布時間:22-11-09 17:15瀏覽次數(shù):69
城市軌道交通供電電壓通常采用DC1500V或DC750V��,其車輛的主要受電方式分為架空接觸網(wǎng)受流和第三軌受流��。第三軌受流根據(jù)受流靴和供電軌的相對位置,又可分為上受流�����、下受流和側(cè)受流3種方式���。上海軌道交通浦江線是采用中間導(dǎo)向膠輪路軌的自動旅客運輸(APM)系統(tǒng),采用第三軌側(cè)面受流(DC±375V),接地軌上受流作為接地�,與傳統(tǒng)的地鐵三軌受流差異較大�。因此,有必要對浦江線APM系統(tǒng)的靴軌關(guān)系進(jìn)行深入研究,確保受流可靠,列車正常運行�����。
本文通過采用德維創(chuàng)數(shù)據(jù)采集設(shè)備,對該線的靴軌平順性進(jìn)行試驗,并對采集的數(shù)據(jù)進(jìn)行分析及實際現(xiàn)場查驗,對安全隱患進(jìn)行預(yù)判�����,及時整改��。同時,通過對靴軌監(jiān)測系統(tǒng)的研究及應(yīng)用,定位靴軌沖突事件并及時檢修���,為線路日常的運維提供了技術(shù)支持和保障��。

1 浦江線APM系統(tǒng)靴軌關(guān)系特點分析
上海軌道交通浦江線APM系統(tǒng)與傳統(tǒng)的城市軌道交通線路不同,采用橡膠輪胎,中間設(shè)置導(dǎo)向軌導(dǎo)向運行,在導(dǎo)向軌上通過絕緣支架架設(shè)2根C型鋼鋁復(fù)合軌���、1根接地軌�,供電電壓為DC±375v,其供電軌��、接地軌斷面圖如圖1所示�。浦江線APM系統(tǒng)采用全自動無人駕駛方式運行。每個轉(zhuǎn)向架上設(shè)置了2個集電靴和1個接地靴,集電靴在DC±375V供電軌槽內(nèi)取電運行,接地靴通過接地軌安全接地��。供電軌��、接地軌并不連續(xù),設(shè)有絕緣接頭��、膨脹接頭及在道岔位置處的分?jǐn)?�,任意處的安裝偏差維護(hù)不到位均有可能導(dǎo)致集電靴�、接地靴經(jīng)過時的不平順,嚴(yán)重時甚至可能發(fā)生集電靴滑出供電軌,對供電軌絕緣罩造成損傷��,導(dǎo)致出現(xiàn)單級接地故障����。因此,需要研究一種有效的試驗檢測方法���,在系統(tǒng)投用前檢測供電軌�、接地軌安裝精度是否達(dá)標(biāo),集電靴�����、接地靴運行是否平順�����,系統(tǒng)運營期間用以檢測供電軌����、接地軌維護(hù)是否到位�����,以及集電靴����、接地靴運行是否平順。本文的靴軌平順性試驗,采用振動加速度傳感器采集集電靴����、接地靴的振動加速度,通過其振動加速度值來判斷集電靴、接地靴運行是否平順���,并通過定位系統(tǒng)確定不平順的位置����。
2 靴軌平順性試驗研究
2.1 試驗概況
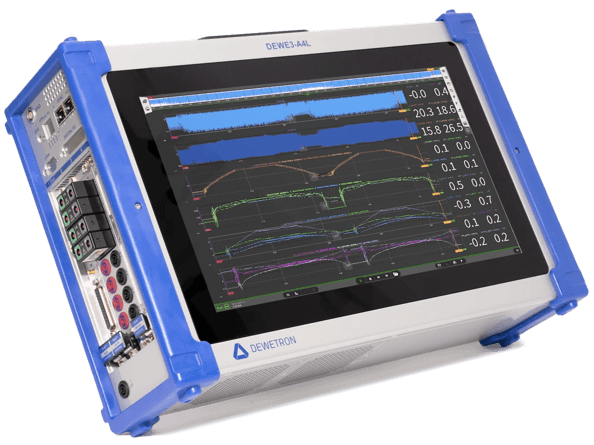
1)試驗內(nèi)容為上海軌道交通浦江線APM系統(tǒng)的靴軌平順性。2)試驗區(qū)間為沈杜公路站至匯臻路站上下行�����。3)試驗車輛為浦江線4節(jié)編組車輛,采用空載形式,集電靴�、接地靴碳刷磨耗小于10%,靜態(tài)接觸壓力≥45N。4)在APM車輛其中一個轉(zhuǎn)向架的2個集電靴和1個接地靴上分別安裝三軸加速度傳感器作為測試點���,在車頂安裝一個全球定位系統(tǒng)(GPS)����。5)試驗工況按正常的運行圖行車,在沈杜公路站至匯臻路站全線區(qū)間以全自動無人駕駛模式進(jìn)行3個往返����。6)試驗設(shè)備包括德維創(chuàng)數(shù)據(jù)采集儀DEWE3-A4、三軸加速度傳感器.全球定位系統(tǒng)�、以及筆記本電腦一臺、導(dǎo)線若干�����。試驗設(shè)備架構(gòu)如圖2所示。
2.2 試驗過程
本試驗主要在APM列車車輛上進(jìn)行,在其轉(zhuǎn)向架的2個集電靴和1個接地靴上分別安裝了三軸加速度傳感器����。其試驗過程如下:1)檢查確認(rèn)選擇的集電靴、接地靴碳刷磨耗小于10%,靜態(tài)接觸壓力≥45N��。2)將三軸加速度傳感器分別固定在2個集電靴和1個接地靴上�����。4)將3個三軸加速度傳感器的9個接頭和GPS接頭分別接入Dewetron數(shù)據(jù)采集的10個通道����。7)調(diào)試完成后進(jìn)行數(shù)據(jù)預(yù)采集;預(yù)采集后在正線進(jìn)行3個往返的運行,分別采集3個三軸加速度傳感器各軸向的加速度試驗數(shù)據(jù)和GPS位置數(shù)據(jù)�。
2.3 數(shù)據(jù)分析及評價
試驗測得數(shù)據(jù)為2個集電靴、1個接地靴上的3個加速度傳感器在x�����、y、z3個方向上正線全線的實時加速度值��。通過分析其加速度曲線發(fā)現(xiàn)���,集電靴的振動加速度主要在水平方向,接地靴的振動加速度主要在垂直方向���。進(jìn)行現(xiàn)場檢查發(fā)現(xiàn),導(dǎo)致出現(xiàn)集電靴水平方向的振動峰值主要原因是:①供電軌水平方向的對齊度不滿足要求;②絕緣接頭磨耗嚴(yán)重。通過調(diào)整供電軌水平方向的對齊度和更換磨耗過度的絕緣接頭后,集電靴水平方向的振動峰值明顯減少���。供電軌調(diào)整前后振動加速度對比數(shù)據(jù)如圖3所示��。
產(chǎn)生接地靴垂直方向振動峰值的主要原因是接地軌垂直方向的對齊度不滿足要求�����,通過調(diào)整接地軌垂直方向的對齊度,接地靴垂直方向的振動峰值明顯減少����,調(diào)整前后振動加速度對比數(shù)據(jù)如圖4所示�。
3 靴軌視頻監(jiān)測系統(tǒng)的功能、組成及原理
3.1 系統(tǒng)功能
車載靴軌視頻監(jiān)測系統(tǒng)采用非接觸式的電流傳感器監(jiān)測方式,可實現(xiàn)對牽引電流實時監(jiān)測�����。該系統(tǒng)通過監(jiān)測牽引電流的變化情況來判斷是否出現(xiàn)靴軌異常。一旦出現(xiàn)異常情況��,系統(tǒng)的分析服務(wù)器將發(fā)送信號給視頻監(jiān)控系統(tǒng),由視頻監(jiān)控系統(tǒng)采集視頻和圖像通過車地?zé)o線傳輸通道把告警信息���、視頻.圖像發(fā)送到運營控制中心����。靴軌監(jiān)測系統(tǒng)的工作流程如圖5所示��。運營控制中心調(diào)度人員通過查看監(jiān)控屏幕推送的報警信息及圖像,確認(rèn)故障信息和圖像;根據(jù)故障的嚴(yán)重程度�����,安排現(xiàn)場應(yīng)急處置人員,并根據(jù)相應(yīng)流程實施應(yīng)急處置�。
3.2 系統(tǒng)組成
靴軌視頻監(jiān)測系統(tǒng)主要由車下視頻采集��、電流傳感器與傳輸設(shè)備�、車內(nèi)電源模塊、交換機(jī)��、分析服務(wù)器與視頻采集服務(wù)器���、地面中心服務(wù)器等組成���。所有從車下視頻采集模塊采集到的數(shù)據(jù),通過網(wǎng)線傳輸?shù)礁鬈噧?nèi)的交換機(jī)內(nèi)����。交換機(jī)與車載主控服務(wù)器通信,主控服務(wù)器對數(shù)據(jù)進(jìn)行存儲和分析處理�,并通過車地?zé)o線網(wǎng)絡(luò)與控制中心的服務(wù)器進(jìn)行通信。
3.3 靴軌異常邏輯判斷原理
靴軌監(jiān)測邏輯判斷的關(guān)鍵是當(dāng)出現(xiàn)集電靴異常情況時必須準(zhǔn)確無誤地做出判斷和報警��,且不能在未出現(xiàn)靴軌異常時由于正����、負(fù)集電靴電流的不平衡面判斷為異常報警。因此,在邏輯計算中,要根據(jù)車輛輔助負(fù)載設(shè)計電流邏輯閾值是否高于負(fù)載電流值進(jìn)行判斷和計算;另外,在車輛非靜態(tài)或惰行情況下進(jìn)行的邏輯判斷結(jié)果更加準(zhǔn)確��,并能夠減少誤報警�。按此原則進(jìn)行設(shè)計,其邏輯判斷應(yīng)包括:1)單節(jié)車輛正極性或負(fù)極性單個集電靴脫靴報警。對所有集電靴的電流監(jiān)測適用�。如果正極性或負(fù)極性的集電靴電流總值在55A以上,監(jiān)測到其中有集電靴電流值在1A以下,且持續(xù)時間超過5s,其異常集電靴則進(jìn)行脫靴報警����。2)單節(jié)車輛正極性或負(fù)極性單側(cè)集電靴脫靴報警。對4節(jié)車輛之間的集電靴電流總和進(jìn)行對比,如有車輛電流的平均值在1A以下����,同時有其他車輛所有集電靴正極性或負(fù)極性電流總值在50A以上���,持續(xù)時間為5s以上時,對應(yīng)的單節(jié)車輛所有集電靴脫靴報警�。3)單節(jié)車輛正極性或負(fù)極性單側(cè)集電靴脫靴接地報警。對每個車輛的集電靴電流值進(jìn)行實時監(jiān)測���。如果系統(tǒng)監(jiān)測到單個集電靴的電流值在600A以上�����,則立刻脫靴報警;如果監(jiān)測到正極性電流值總和與負(fù)極電流值總和不等�����,且兩個總和的差值在50A以上,則可以判斷總和值比較大的那邊極性有集電靴接地問題�。取2個同極性集電靴中電流值較小的判斷為集電靴脫落接地��,啟動報警機(jī)制���。4)單節(jié)車輛正極性或負(fù)極性單側(cè)集電靴脫靴受流不穩(wěn)報警的第1種情況。對所有集電靴的電流監(jiān)測適用���。如正極性或負(fù)極性的集電靴電流總值在50A以上�����、監(jiān)測到其中有集電靴電流值在1A以下且在1min內(nèi)累計持續(xù)時間在5s以上時,其異常集電靴進(jìn)行異常預(yù)警類型報警���。5)單節(jié)車輛正極性或負(fù)極性單側(cè)集電靴脫靴受流不穩(wěn)報警的第2種情況�。如果單側(cè)電流值急速下降��,其電流值的導(dǎo)數(shù)為接近于無窮大(電流值微分處理)�����,即電流值急速下降���,則可以判斷集電靴有脫落風(fēng)險�����,應(yīng)進(jìn)行脫靴預(yù)警�。6)單節(jié)車輛正極性或負(fù)極性單側(cè)集電靴脫靴受流不穩(wěn)報警的第3種情況����。將車內(nèi)不同集電靴的數(shù)據(jù)離散程度進(jìn)行分析,獲取差異化�,基于差異化進(jìn)行分析��,按照離散差異超過20%進(jìn)行脫靴預(yù)警�����。
3.4 試驗驗證
根據(jù)上述靴軌異常邏輯判斷原理�,對相關(guān)邏輯判斷進(jìn)行了實驗室試驗驗證和實車試驗驗證�。限于篇幅,本文僅給出實車測試中單個集電靴脫靴的電流數(shù)據(jù)����。對單節(jié)車輛中的4個集電靴分別編號為1號、2號�、3號和4號集電靴。在列車運行過程中����,通過絕緣傳動裝置使3號集電靴脫離供電軌,滿足了上文第1種邏輯判斷:正負(fù)集電靴電流總值在55A以上,3號集電靴電流值在1A以下��,且持續(xù)時間5s以上�����,集電靴電流曲線如圖6所示�����,因而監(jiān)測系統(tǒng)觸發(fā)3號集電靴脫靴報警�����,并將報警信息及圖像值推送至控制中心�����。
4 結(jié)語
本文通過靴軌平順性試驗測試得到的結(jié)果是:在連續(xù)的供電軌�、接地軌區(qū)段,靴軌平順性指標(biāo)良好;而在道岔分段處����,靴軌的平順性受供電軌、接地軌的對齊精度影響較大��。通過定期進(jìn)行靴軌平順性試驗���,對大量試驗數(shù)據(jù)進(jìn)行分析���,統(tǒng)計出其振動加速度峰值數(shù)據(jù),進(jìn)行預(yù)防性維護(hù),可極大地降低靴軌沖突事件的發(fā)生�。本文通過對靴軌視頻監(jiān)測系統(tǒng)的研究,實現(xiàn)了對無人駕駛APM系統(tǒng)列車靴軌狀態(tài)的實時監(jiān)測����。該監(jiān)測系統(tǒng)能自動識別并監(jiān)測絕大部分靴軌運行的異常現(xiàn)象�,可利用車地?zé)o線通信網(wǎng)絡(luò)向控制中心推送故障報警信息和故障視頻及圖像,再由控制中心對所有列車進(jìn)行集中管控��。靴軌平順性測試為預(yù)防性維護(hù)提供了依據(jù)�����,結(jié)合運營過程中靴軌視頻監(jiān)測系統(tǒng)的應(yīng)用�,可極大地提高APM系統(tǒng)靴軌運營安全監(jiān)測和管理維護(hù)效率。





 滬公網(wǎng)安備31011402010445
滬公網(wǎng)安備31011402010445